

FEATURED ARTICLE
Solid-State Battery
What Happened to Toyota’s solid-state battery?
Toyota is planning to unveil an electric car that will change everything as this electric vehicle comes with a solid-state lithium-ion battery.
Electric & Hybrid Cars
What are the Differences Between Electric and Hybrid Cars
When you tend to shop for eco-friendly vehicles, you will likely have questions about electric and hybrid cars. Although electric cars have been a buzzword for some time now, you might have heard of hybrid cars available in your locality for a longer time.
Hydrogen Fuel Cell Cars
Hydrogen Fuel Cell Cars How It Works (Pros And Cons)
Hydrogen fuel cell cars are significant cars that use hydrogen as fuel as their motive energy, and as much making them energy-efficient substitutes compared to gasoline vehicles.
RECENT BLOG POST
- Can I Get More Amps Out Of My Alternator?The good news is that there are methods you can use if you want to get more amps out of your alternator. I’ll reveal in this article how you can do… Read more: Can I Get More Amps Out Of My Alternator?
- The Future Of Car Sharing And Car Rental Services.The future of car rental services has never been brighter than it is in 2023. Whether for business or pleasure, short term or a couple of weeks, on an economy budget,… Read more: The Future Of Car Sharing And Car Rental Services.
- When I Buy A Car From A Private Seller Can I Drive It Home In US And UK?All right, picture this: you’ve been on the hunt for the ideal used car and finally, there it is. The color’s a match, it has all the bells and whistles you’ve… Read more: When I Buy A Car From A Private Seller Can I Drive It Home In US And UK?


What Topics Are You Interested In?











OLDER POST
- How to Fix a Rear View Mirror that Fell Off?: Remarkable Repairing GuideAt times we see that rear view mirror fell off that creates problem to the driver. The rear visibility of your car gets reduced if rear view mirror falls off.… Read more: How to Fix a Rear View Mirror that Fell Off?: Remarkable Repairing Guide
- How to Glue Rear View Mirror on Windshield?: Attach it CorrectlyThis article is for you if you looking for how to put rear view mirror back on mount or how to attach rear view mirror to windshield. You see, almost… Read more: How to Glue Rear View Mirror on Windshield?: Attach it Correctly
- How to Fix Auto-Dimming Rear View Mirror? – Easy GuideAuto-dimming mirrors are one of the great inventions for the people who drive in dark or late in the night. These mirrors are a type of rearview mirrors that are… Read more: How to Fix Auto-Dimming Rear View Mirror? – Easy Guide
- Best Clip on Rear View Mirror – Top Rated Automotive Mirrors of 2021Rear view mirrors are an essential part of the car interiors. A right rear view mirror will not only increase the safety but will also help in viewing your surroundings… Read more: Best Clip on Rear View Mirror – Top Rated Automotive Mirrors of 2021
- How to Repair Mirror Desilvering?– Easy Ways to Fix Mirror ScratchesMirrors are shiny, functional, and decorative. They are among the most beautiful pieces of home décor we have. At the same time, they are a must-have in the bathroom and… Read more: How to Repair Mirror Desilvering?– Easy Ways to Fix Mirror Scratches
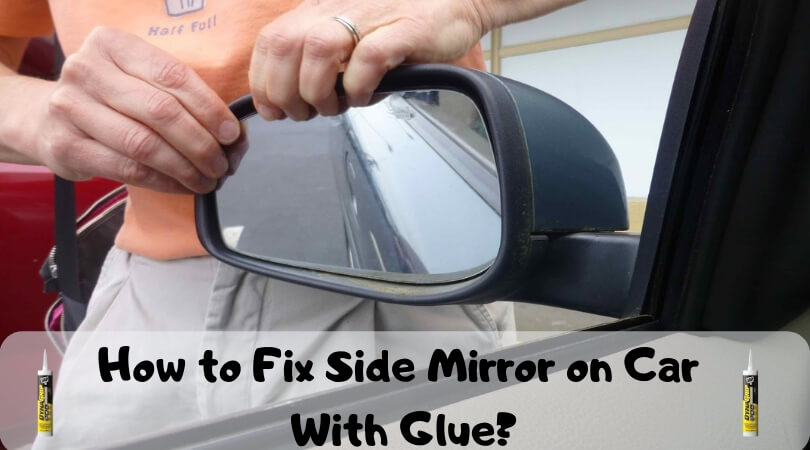
- How to Fix Side Mirror on Car With Glue? – Guide to Attach Side MirrorSide mirrors are crucial for driving safely. The beginners, as well as trained drivers, know how important it is to have side mirrors. But sometimes you might notice that the… Read more: How to Fix Side Mirror on Car With Glue? – Guide to Attach Side Mirror





ehcar